
3DSの「保護者による使用制限」を解除する方法
ねこじた
三色団子.com

ここからは先ほどまで作業していたArduino開発環境に「画像認識機能」を追加する作業となります。
画像認識に使うのが前述した「Poke-Controller」と呼ばれるツールです。
1 Nintendo Switch Controllライブラリの導入
まずはArduino IDEに「Nintendo Switch Controll」というライブラリを追加していきます。
上記リンクからGitHubに移動して「Code」から「Download ZIP」をクリックします。
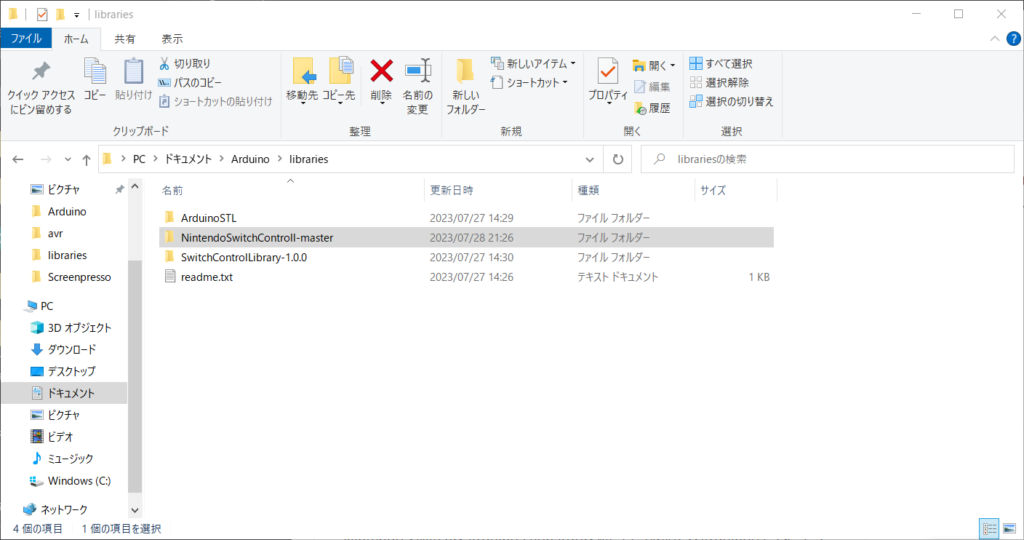
ダウンロードしたZIPファイルを解凍してArduinoのライブラリフォルダにフォルダごと入れてください。この作業は必ずArduino IDEが終了している状態で行ってください。
2 Nintendo Switch Controllライブラリのソースコードの置換
上記リンクから「auto_command_util.h」と「auto_command_util.cpp」の2つのファイルをダウンロードします。
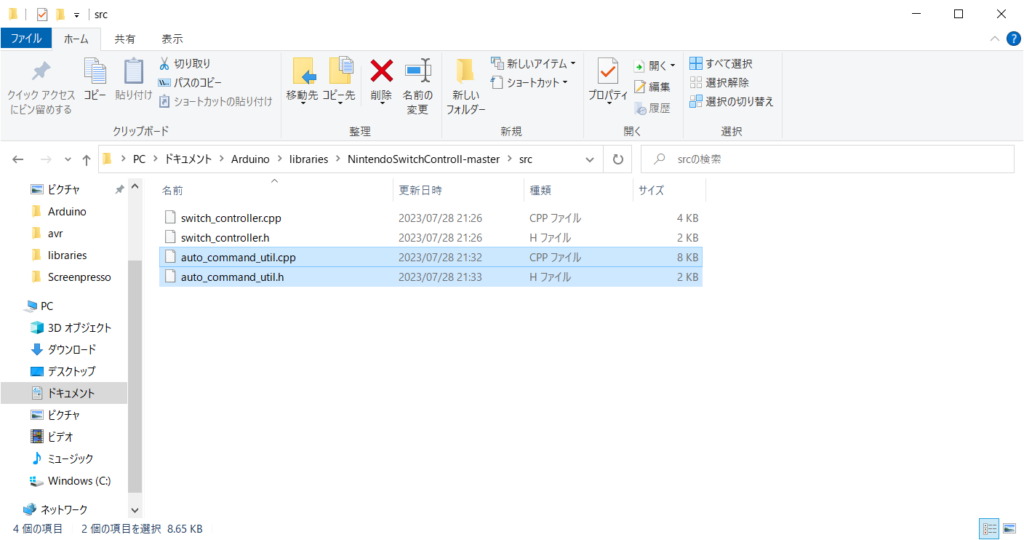
先ほど追加したNintendo Switch Controllのライブラリ内にある「src」に2つのファイルを入れます。上書き保存でOKです。
3 Poke-Controller導入用バッチファイル一式をダウンロード
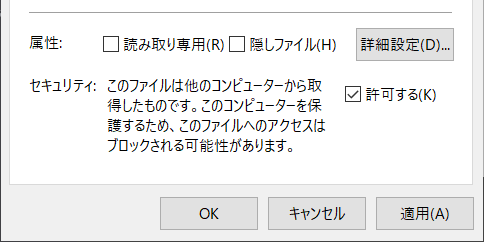
ダウンロードしたZIPファイルを右クリックして「プロパティ」から「セキュリティ」の項目を「許可する」にチェックを入れて適用を押します。
そのあとCドライブ直下など「日本語が含まれない」パスに展開してください。
4 「1_MakePokeConEnv.bat」を管理者権限で実行
Poke-Controllerの動作環境であるPythonをインストールしていきます。そのためまずはCUIから呼び出せるGITのインストールが必要です。
先ほど展開した「BatsForPokeCon_v05」内にある「PokeController」を開いて中にある「1_MakePokeConEnv.bat」を右クリックから「管理者権限で実行」をクリックします。
「Poke-Controller-Modifiedの環境構築が完了しました」と表示されればOKです。(そこそこ時間がかかるので焦らずに…)
5 「2-2_ClonePokeConModified.bat」を管理者権限で実行
同フォルダ内にある「2-2_ClonePokeConModified.bat」を右クリックから「管理者権限で実行」で起動していきます。
「Poke-Controller-Modifiedの取得が完了しました」と表示されればOKです。(こっちは爆速で終わります)
Cドライブ直下に「PokeCon」というフォルダが作成されていれば問題なく導入できています。
一応ここまでで必要なソフトウェアのインストールは作業は終了しました。ここからは実際に「Poke-Controller」を使えるようにセットしていきます。
1 Arduino Leonardo用プログラム一式をダウンロード
Poke-ControllerからのコマンドをFTDI経由で操作するためにシリアルに入ってきた情報をSwitch操作コマンドに変換するためのプログラムを書き込んでいきます。
上記リンクからZIPファイルをダウンロードします。
2 「HID-Project.h」をインストール
ダウンロードしたZIPファイルを解凍してArduino内にある「Poke-ControllerForLeonardo」をドキュメント直下のArduinoフォルダに入れます。
そのあと「Poke-ControllerForLeonardo.ino」をArduino IDEで開きます。
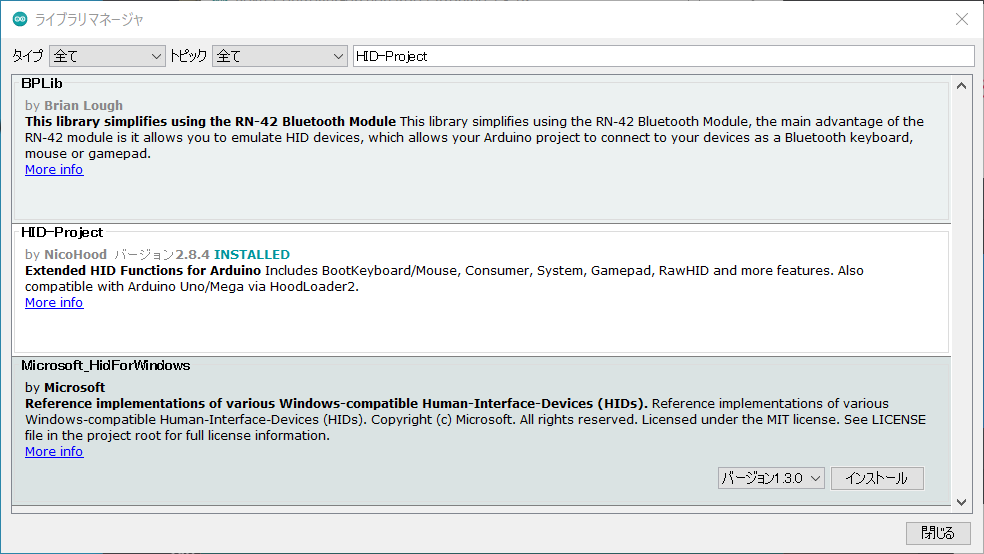
「スケッチ>ライブラリのインクルード>ライブラリを管理」と進んでいき、検索バーに「HID-Project」と入力します。
出てきた「HID-Projec」を「バージョン2.8.4」でインストールします。
3 コンパイルしてArduinoLeonardoに書き込む
一度ここでドキュメント直下のArduinoフォルダにある「Poke-ControllerForLeonardo.ino」を起動して「左上のチェックマーク(検証)」をクリックします。
「コンパイルが完了しました。」と表示されればOKです。
実際にマイコンとPCを繋いで「→(マイコンボードに書き込む)」をクリックします。しばらく待って「ボードへの書き込みが完了しました。」と表示されればOKです。
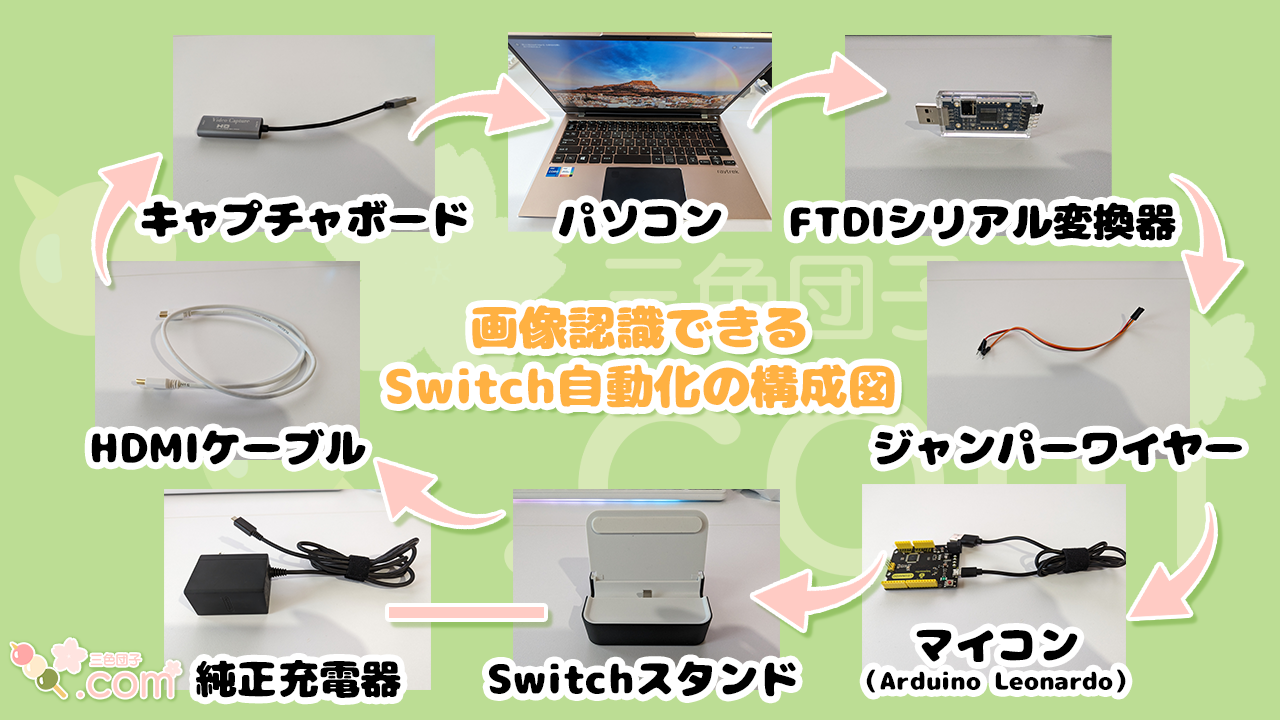
4 機器のセットアップ
ここからは購入した機器をそれぞれ接続していきます。

唯一複雑な点はシリアル変換器とArduino Leonardoを接続する際の配線だと思います。購入した「ジャンパーワイヤー(オス-メス)」を接続していきます。
それぞれ接続することができたら次に進んでください。
長くなりましたがやっと「Poke-Controller」を起動していきます。
1 デバイスマネージャーでシリアル変換器のポート番号を確認
まずはデバイスマネージャーを開いてシリアル変換器の番号を確認しておきます。後ほど使うので必ず番号を覚えておきましょう。
2 「3-2_ExecutePokeConModified.bat」を実行
PokeControllerフォルダ直下の「3-2_ExecutePokeConModified.bat」を起動してください。今までは管理者権限で実行していましたが、「3-2_ExecutePokeConModified.bat」に関してはそのまま起動してOKです。
今後もPoke-Controllerを起動するときは「3-2_ExecutePokeConModified.bat」を起動していきます。
3 Poke-Controllerの設定を修正
無事起動したらまずはキャプチャーボードが正常に認識されているか確認します。
他にもFPSや解像度、Show Realtimeのチェックを入れるなど設定が必要な箇所があるので、しっかり確認してください。
これでArduino開発環境に「画像認識機能」を追加する作業が終わりました!お疲れ様です。
次は実際に自動化のプログラムを導入していく作業になります!